publications and other writing
2024
-
 A Library of Lower Fidelity Dynamics Models (LFDMs) For On-Road Vehicle Dynamics Targeting Faster Than Real-Time ApplicationsHuzaifa Mustafa Unjhawala, Ishaan Mahajan , Radu Serban, and Dan NegrutJournal of Open Source Software, 2024
A Library of Lower Fidelity Dynamics Models (LFDMs) For On-Road Vehicle Dynamics Targeting Faster Than Real-Time ApplicationsHuzaifa Mustafa Unjhawala, Ishaan Mahajan , Radu Serban, and Dan NegrutJournal of Open Source Software, 2024Lower Fidelity Dynamic Models (LFDM) is a library of dynamics models for on-road wheeled vehicles that is written in C++ and CUDA and wrapped to Python using SWIG. Each model is described as a set of Ordinary Differential Equations (ODEs) that take a driver inputa normalized throttle between 0 and 1, a normalized steering between-1 and 1 (with-1 representing max steering toward a left turn), and a normalized braking input between 0 and 1, and subsequently advance the state of the vehicle (its position and velocity) forward in time.
-
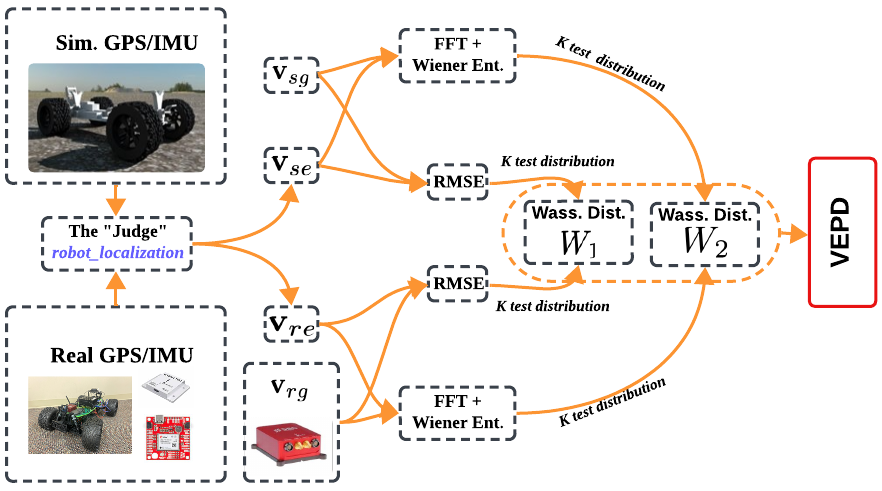 Quantifying the Sim2real Gap for GPS and IMU SensorsIshaan Mahajan , Huzaifa Unjhawala, Harry Zhang, Zhenhao Zhou, Aaron Young, Alexis Ruiz, Stefan Caldararu, Nevindu Batagoda, Sriram Ashokkumar, and Dan NegrutarXiv preprint arXiv:2403.11000, 2024
Quantifying the Sim2real Gap for GPS and IMU SensorsIshaan Mahajan , Huzaifa Unjhawala, Harry Zhang, Zhenhao Zhou, Aaron Young, Alexis Ruiz, Stefan Caldararu, Nevindu Batagoda, Sriram Ashokkumar, and Dan NegrutarXiv preprint arXiv:2403.11000, 2024Simulation can and should play a critical role in the development and testing of algorithms for autonomous agents. What might reduce its impact is the “sim2real” gap – the algorithm response differs between operation in simulated versus real-world environments. This paper introduces an approach to evaluate this gap, focusing on the accuracy of sensor simulation – specifically IMU and GPS – in velocity estimation tasks for autonomous agents. Using a scaled autonomous vehicle, we conduct 40 real-world experiments across diverse environments then replicate the experiments in simulation with five distinct sensor noise models. We note that direct comparison of raw simulation and real sensor data fails to quantify the sim2real gap for robotics applications. We demonstrate that by using a state of the art state-estimation package as a “judge”, and by evaluating the performance of this state-estimator in both real and simulated scenarios, we can isolate the sim2real discrepancies stemming from sensor simulations alone. The dataset generated is open-source and publicly available for unfettered use.
-
 Using Simulation to Design Path Following and Obstacle Avoidance Policies for Autonomous RobotsHarry Zhang, Stefan Caldararu, Alexis Ruiz, Huzaifa Unjhawala, Nevindu Batagoda, Ishaan Mahajan , Sriram Ashokkumar, Jason Zhou, Aaron Young, and Dan Negrut2024
Using Simulation to Design Path Following and Obstacle Avoidance Policies for Autonomous RobotsHarry Zhang, Stefan Caldararu, Alexis Ruiz, Huzaifa Unjhawala, Nevindu Batagoda, Ishaan Mahajan , Sriram Ashokkumar, Jason Zhou, Aaron Young, and Dan Negrut2024This study explores the development of neural network-based control policies for autonomous robots, focusing on path following and obstacle avoidance. Utilizing the Autonomy Research Testbed (ART) and the Chrono simulation engine, we crafted two control strategies: an end-to-end imitation learning policy and a hybrid policy combining path following with a value function-based obstacle controller. Preliminary simulations validate both approaches, highlighting their respective efficiencies in managing complex navigation tasks. Future efforts will address transferring these policies to real vehicles, emphasizing the reduction of the sim-to-real performance gap.
-
 Evaluating the Sim-to-Real Transferability of End-to-End Control Policies for Autonomous Vehicles Operating on Deformable TerrainsHuzaifa Unjhawala, Zhenhao Zhou, Ishaan Mahajan , Harry Zhang, Alexis Ruiz, Radu Serban, and Dan Negrut2024
Evaluating the Sim-to-Real Transferability of End-to-End Control Policies for Autonomous Vehicles Operating on Deformable TerrainsHuzaifa Unjhawala, Zhenhao Zhou, Ishaan Mahajan , Harry Zhang, Alexis Ruiz, Radu Serban, and Dan Negrut2024We report on the transfer of an end-to-end control policy synthesized in simulation to a real-world set-ting. The policy guides a 1/6th scale vehicle, named ART-B, to a target location while navigating aroundobstacles with the aid of a 2D Lidar and GPS sensor. We utilize Gym-Chrono, a ReinforcementLearning (RL) environment based on the Project Chrono simulator, and the Open AI Gymnasium frame-work to synthesize this control policy trained using the Proximal Policy Optimization (PPO) algorithm.The approach involves training three versions of the policy: one for guiding ART-B across flat-rigid ter-rain, another for hilly-rigid terrain, and a third for hilly-deformable terrain. Subsequently, each policy will be tested in a real-world scenario with deformable terrain to answer the underlying research question– Does training an end-to-end control policy in a simulated setting with deformable terrain enhance itseffectiveness in real-world applications?
-
 Rapid Development of an Autonomous Vehicle for the SAE AutoDrive Challenge II CompetitionSriram Ashokkumar, Anirudh Jayendra, Sam Tobin, Ariel Leykin, Robert Stegeman, Abhiraj Dashora, Bryan Look, Joseph Koenig, Brian Hu, Mason Crooks, Ishaan Mahajan , and others2024
Rapid Development of an Autonomous Vehicle for the SAE AutoDrive Challenge II CompetitionSriram Ashokkumar, Anirudh Jayendra, Sam Tobin, Ariel Leykin, Robert Stegeman, Abhiraj Dashora, Bryan Look, Joseph Koenig, Brian Hu, Mason Crooks, Ishaan Mahajan , and others2024The SAE AutoDrive Challenge II is a four-year collegiate competition dedicated to developing a Level 4 autonomous vehicle by 2025. In January 2023, the participating teams each received a Chevy Bolt EUV. Within a span of five months, the second phase of the competition took place in Ann Arbor, MI. The authors of this contribution, who participated in this event as team Wisconsin Autonomous representing the University of Wisconsin–Madison, secured second place in static events and third place in dynamic events. This has been accomplished by reducing reliance on the actual vehicle platform and instead leveraging physical analogs and simulation. This paper outlines the software and hardware infrastructure of the competing vehicle, touching on issues pertaining sensors, hardware, and the software architecture employed on the autonomous vehicle. We discuss the LiDAR-camera fusion approach for object detection and the three-tier route planning and following systems. One of the defining aspects of our approach was leveraging early simulation and the use of physical analogs, which accelerated the development of the autonomy algorithms. In the process, we established a rapid autonomous vehicle development methodology that will anchor our technical effort in the third stage of the SAE AutoDrive Challenge II competition.
-
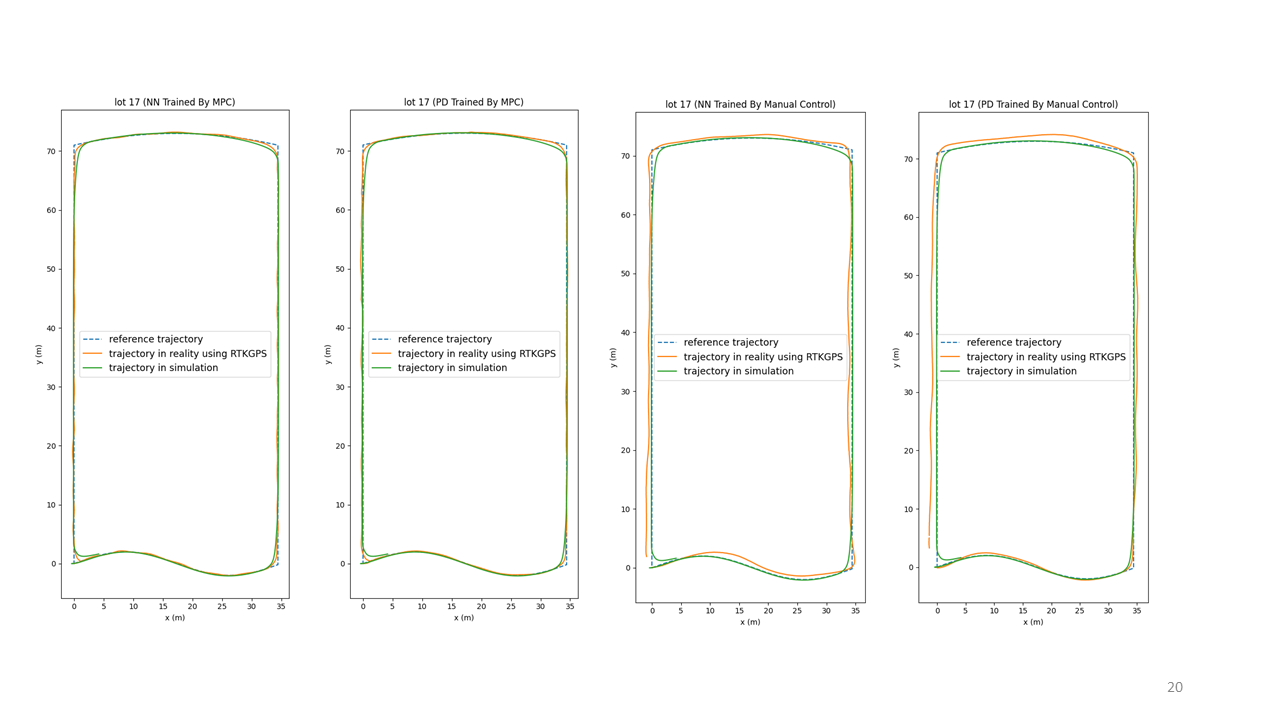
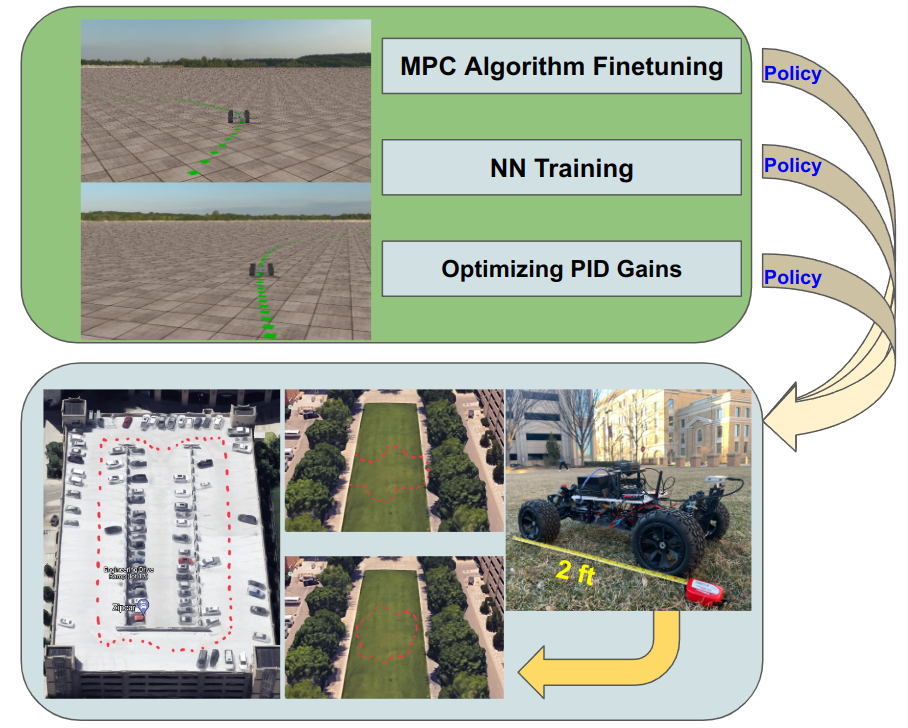 A Study on the Use of Simulation in Synthesizing Path-Following Control Policies for Autonomous Ground RobotsHarry Zhang, Stefan Caldararu, Aaron Young, Alexis Ruiz, Huzaifa Unjhawala, Ishaan Mahajan , Sriram Ashokkumar, Nevindu Batagoda, Zhenhao Zhou, Luning Bakke, and othersarXiv preprint arXiv:2403.18021, 2024
A Study on the Use of Simulation in Synthesizing Path-Following Control Policies for Autonomous Ground RobotsHarry Zhang, Stefan Caldararu, Aaron Young, Alexis Ruiz, Huzaifa Unjhawala, Ishaan Mahajan , Sriram Ashokkumar, Nevindu Batagoda, Zhenhao Zhou, Luning Bakke, and othersarXiv preprint arXiv:2403.18021, 2024We report results obtained and insights gained while answering the following question: how effective is it to use a simulator to establish path following control policies for an autonomous ground robot? While the quality of the simulator conditions the answer to this question, we found that for the simulation platform used herein, producing four control policies for path planning was straightforward once a digital twin of the controlled robot was available. The control policies established in simulation and subsequently demonstrated in the real world are PID control, MPC, and two neural network (NN) based controllers. Training the two NN controllers via imitation learning was accomplished expeditiously using seven simple maneuvers: follow three circles clockwise, follow the same circles counter-clockwise, and drive straight. A test randomization process that employs random micro-simulations is used to rank the “goodness” of the four control policies. The policy ranking noted in simulation correlates well with the ranking observed when the control policies were tested in the real world. The simulation platform used is publicly available and BSD3-released as open source; a public Docker image is available for reproducibility studies. It contains a dynamics engine, a sensor simulator, a ROS2 bridge, and a ROS2 autonomy stack the latter employed both in the simulator and the real world experiments.






2023
-
 Zero-Shot Policy Transferability for the Control of a Scale Autonomous VehicleHarry Zhang, Stefan Caldararu, Sriram Ashokkumar, Ishaan Mahajan , Aaron Young, Alexis Ruiz, Huzaifa Unjhawala, Luning Bakke, and Dan NegrutarXiv preprint arXiv:2309.09870, 2023
Zero-Shot Policy Transferability for the Control of a Scale Autonomous VehicleHarry Zhang, Stefan Caldararu, Sriram Ashokkumar, Ishaan Mahajan , Aaron Young, Alexis Ruiz, Huzaifa Unjhawala, Luning Bakke, and Dan NegrutarXiv preprint arXiv:2309.09870, 2023We report on a study that employs an in-house developed simulation infrastructure to accomplish zero shot policy transferability for a control policy associated with a scale autonomous vehicle. We focus on implementing policies that require no real world data to be trained (Zero-Shot Transfer), and are developed in-house as opposed to being validated by previous works. We do this by implementing a Neural Network (NN) controller that is trained only on a family of circular reference trajectories. The sensors used are RTK-GPS and IMU, the latter for providing heading. The NN controller is trained using either a human driver (via human in the loop simulation), or a Model Predictive Control (MPC) strategy. We demonstrate these two approaches in conjunction with two operation scenarios: the vehicle follows a waypoint-defined trajectory at constant speed; and the vehicle follows a speed profile that changes along the vehicle’s waypoint-defined trajectory. The primary contribution of this work is the demonstration of Zero-Shot Transfer in conjunction with a novel feed-forward NN controller trained using a general purpose, in-house developed simulation platform.
-
 Using simulation to design an MPC policy for field navigation using GPS sensingHarry Zhang, Stefan Caldararu, Ishaan Mahajan , Shouvik Chatterjee, Thomas Hansen, Abhiraj Dashora, Sriram Ashokkumar, Luning Fang, Xiangru Xu, Shen He, and othersECCOMAS Thematic Conference on Multibody Dynamics, 2023
Using simulation to design an MPC policy for field navigation using GPS sensingHarry Zhang, Stefan Caldararu, Ishaan Mahajan , Shouvik Chatterjee, Thomas Hansen, Abhiraj Dashora, Sriram Ashokkumar, Luning Fang, Xiangru Xu, Shen He, and othersECCOMAS Thematic Conference on Multibody Dynamics, 2023Modeling a robust control system with a precise GPS-based state estimation capability in simulation can be useful in field navigation applications as it allows for testing and validation in a controlled environment. This testing process would enable navigation systems to be developed and optimized in simulation with direct transferability to real-world scenarios. The multi-physics simulation engine Chrono allows for the creation of scenarios that may be difficult or dangerous to replicate in the field, such as extreme weather or terrain conditions. Autonomy Research Testbed (ART), a specialized robotics algorithm testbed, is operated in conjunction with Chrono to develop an MPC control policy as well as an EKF state estimator. This platform enables users to easily integrate custom algorithms in the autonomy stack. This model is initially developed and used in simulation and then tested on a twin vehicle model in reality, to demonstrate the transferability between simulation and reality (also known as Sim2Real).
-
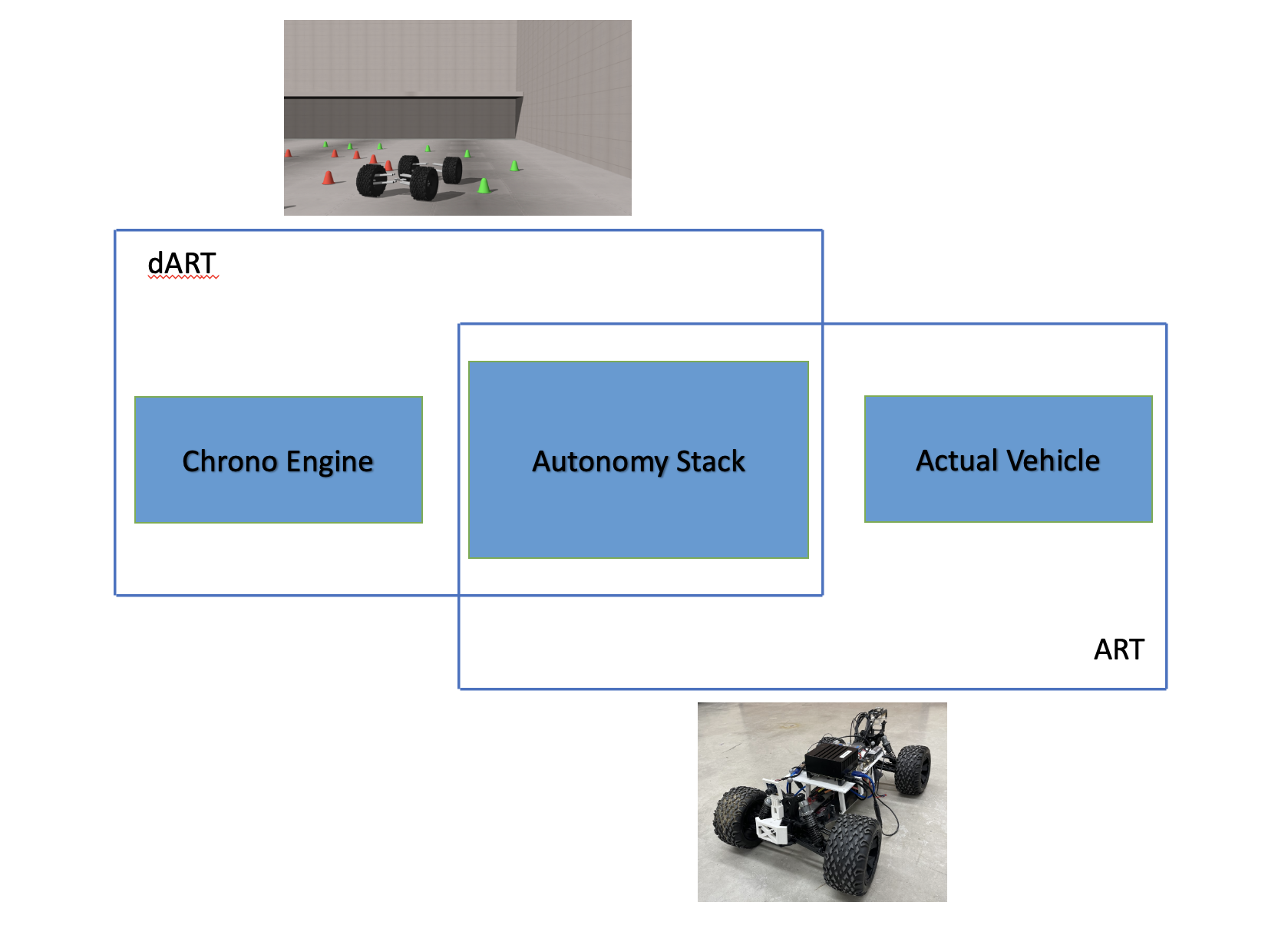
 An Overview of a Framework for Designing Robot Autonomy Stacks in SimulationThomas Hansen, Shouvik Chatterjee, Sriram Ashokkumar, Ishaan Mahajan , Harry Zhang, Stefan Caldararu, Abhiraj Dashora, Aaron Young, He Shen, Luning Fang, and othersECCOMAS Thematic Conference on Multibody Dynamics, 2023
An Overview of a Framework for Designing Robot Autonomy Stacks in SimulationThomas Hansen, Shouvik Chatterjee, Sriram Ashokkumar, Ishaan Mahajan , Harry Zhang, Stefan Caldararu, Abhiraj Dashora, Aaron Young, He Shen, Luning Fang, and othersECCOMAS Thematic Conference on Multibody Dynamics, 2023We describe a software framework and a hardware platform used in tandem for the design and analysis of robot autonomy algorithms in simulation and reality. The software, which is open source, containerized, and operating system (OS) independent, has three main components: a ROS 2 interface to a vehicle simulation framework (Chrono), which provides high-fidelity wheeled/tracked vehicle and sensor simulation; a basic ROS 2-based autonomy stack for algorithm design and testing; and, a development ecosystem which enables visualization, and hardware-in-the-loop experimentation in perception, state estimation, path planning, and controls. The accompanying hardware platform is a 1/6th scale vehicle augmented with reconfigurable mountings for computing, sensing, and tracking. Its purpose is to allow algorithms and sensor configurations to be physically tested and improved. Since this vehicle platform has a digital twin within the simulation environment, one can test and compare the same algorithms and autonomy stack in simulation and reality. This platform has been built with an eye towards characterizing and managing the simulation-toreality gap. Herein, we describe how this platform is set up, deployed, and used to improve autonomy for mobility applications.
-
 A Case Study of the Sim-to-Real Gap When Designing PID and MPC Controllers in SimulationHarry Zhang, Stefan Caldararu, Thomas Hansen, Shouvik Chatterjee, Nevindu Batagoda, Ishaan Mahajan , Sriram Ashokkumar, Aaron Young, Luning Fang, He Shen, and othersECCOMAS Thematic Conference on Multibody Dynamics, 2023
A Case Study of the Sim-to-Real Gap When Designing PID and MPC Controllers in SimulationHarry Zhang, Stefan Caldararu, Thomas Hansen, Shouvik Chatterjee, Nevindu Batagoda, Ishaan Mahajan , Sriram Ashokkumar, Aaron Young, Luning Fang, He Shen, and othersECCOMAS Thematic Conference on Multibody Dynamics, 2023This extended abstract reports on early results generated with a research testbed whose purpose is the characterization, measurement, and mitigation of the gap between simulation and reality in robots and off-road autonomous vehicles. Sometimes called the sim2real gap [1], it pertains to the difference in behavior of a robot whose autonomy stack is designed in simulation and then deployed in the real world. In most cases, the behavior in simulation is manifestly superior to the one in the real world. There are many causes for this, eg: the difference associated with the process of simulating sensors; the idealization of the dynamics model used to represent the motion of the real robot; shortcomings in capturing the world within which the robot operates; the non-deterministic temporal manner in which the underlying Robot Operating System (ROS) infrastructure operates, which leads to race conditions in producing and using information; and the difference in compute power available on an actual robot and when carrying out simulation. Ultimately, the sim2real gap is the observed inability of a control policy designed in simulation to work well with the real robot over a broad spectrum of operation regimes. Closing the sim2real gap is a case by case undertaking. In this abstract, we show a manifestation of this gap as it played out in conjunction with an in-house developed framework called ART/ATK–Autonomy Research Testbed/Autonomy Toolkit [2, 3], which is used to design and test autonomy stacks.
-
 Technical Report TR–2023–08Huzaifa Unjhawala, Ishaan Mahajan , Radu Serban, and Dan NegrutSimulation Based Engineering Lab, 2023
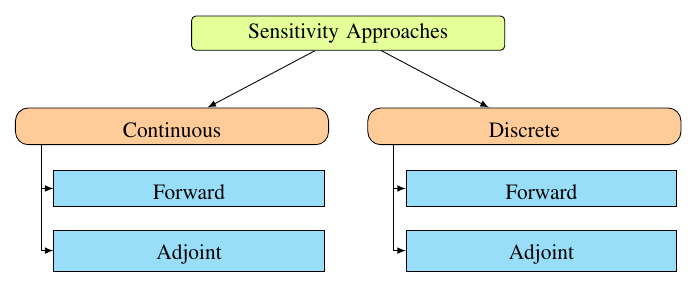
Technical Report TR–2023–08Huzaifa Unjhawala, Ishaan Mahajan , Radu Serban, and Dan NegrutSimulation Based Engineering Lab, 2023Most dynamic systems, including vehicles can be modelled in the form of first order Initial Value problems which is an Ordinary Differential Equation (ODE) along with an Initial Condition. This in explicit form is usually given by: u= f (u, P, t), u (t0)= u0 (P)(1) where u∈ RN where N is the dimension of the system state space and P∈ RNP is the vector of parameters that define the system. For a vehicle P consists of parameters such as tire stiffness, friction coefficient etc. It is not always the case that first/second order systems can be written in this form; but for the purpose of this report, we will only consider those systems that can. In this technical report, we discuss the existing methods used for sensitivity analysis of first order systems given by Eq.(1) and where Automatic Differentiation (AD) can be used to make computation more accurate and fast. Section 2 gives a short overview on the taxonomy of different approaches uses for sensitivity calculation. The Continuous Sensitivity Analysis (CSA) is described in Sec. 3 along with a short discussion. Section 4 describes the Discrete Sensitivity Analysis along with its pros and cons in comparison to CSA. Discussion on the existing packages, available benchmarks and future work make up Sec. 5.
-
 Technical Report TR–2022–02Stefan Caldararu, Harry Zhang, Ishaan Mahajan , Thomas Hansen, Shouvik Chatterjee, Nevindu Batagoda, Radu Serban, and Dan NegrutSimulation Based Engineering Lab, 2023
Technical Report TR–2022–02Stefan Caldararu, Harry Zhang, Ishaan Mahajan , Thomas Hansen, Shouvik Chatterjee, Nevindu Batagoda, Radu Serban, and Dan NegrutSimulation Based Engineering Lab, 2023We propose a new GPS model that produces synthetic data that mimics more accurately real GPS data. An analysis of current GPS models is presented, and a new model based on Concentration Gradient Random Walks in the second derivative of the measurement is proposed. This model is implemented in the Chrono:: Sensor [1] module, and utilized in the ART/ATK [2] project to demonstrate its capabilities. In the future this model will be used in applications for mitigating the sim-to-real gap. Specifically, it will be used in a Kalman Filter application to measure performance between simulated and real state estimation, as well as an MPC formulation to drive through waypoints.






2022
-
 A software toolkit and hardware platform for investigating and comparing robot autonomy algorithms in simulation and realityAsher Elmquist, Aaron Young, Ishaan Mahajan , Kyle Fahey, Abhiraj Dashora, Sriram Ashokkumar, Stefan Caldararu, Victor Freire, Xiangru Xu, Radu Serban, and othersIEEE/RSJ International Conference on Intelligent Robots and Systems, 2022
A software toolkit and hardware platform for investigating and comparing robot autonomy algorithms in simulation and realityAsher Elmquist, Aaron Young, Ishaan Mahajan , Kyle Fahey, Abhiraj Dashora, Sriram Ashokkumar, Stefan Caldararu, Victor Freire, Xiangru Xu, Radu Serban, and othersIEEE/RSJ International Conference on Intelligent Robots and Systems, 2022We describe a software framework and a hardware platform used in tandem for the design and analysis of robot autonomy algorithms in simulation and reality. The software, which is open source, containerized, and operating system (OS) independent, has three main components: a ROS 2 interface to a C++ vehicle simulation framework (Chrono), which provides high-fidelity wheeled/tracked vehicle and sensor simulation; a basic ROS 2-based autonomy stack for algorithm design and testing; and, a development ecosystem which enables visualization, and hardware-in-the-loop experimentation in perception, state estimation, path planning, and controls. The accompanying hardware platform is a 1/6th scale vehicle augmented with reconfigurable mountings for computing, sensing, and tracking. Its purpose is to allow algorithms and sensor configurations to be physically tested and improved. Since this vehicle platform has a digital twin within the simulation environment, one can test and compare the same algorithms and autonomy stack in simulation and reality. This platform has been built with an eye towards characterizing and managing the simulation-to-reality gap. Herein, we describe how this platform is set up, deployed, and used to improve autonomy for mobility applications.
